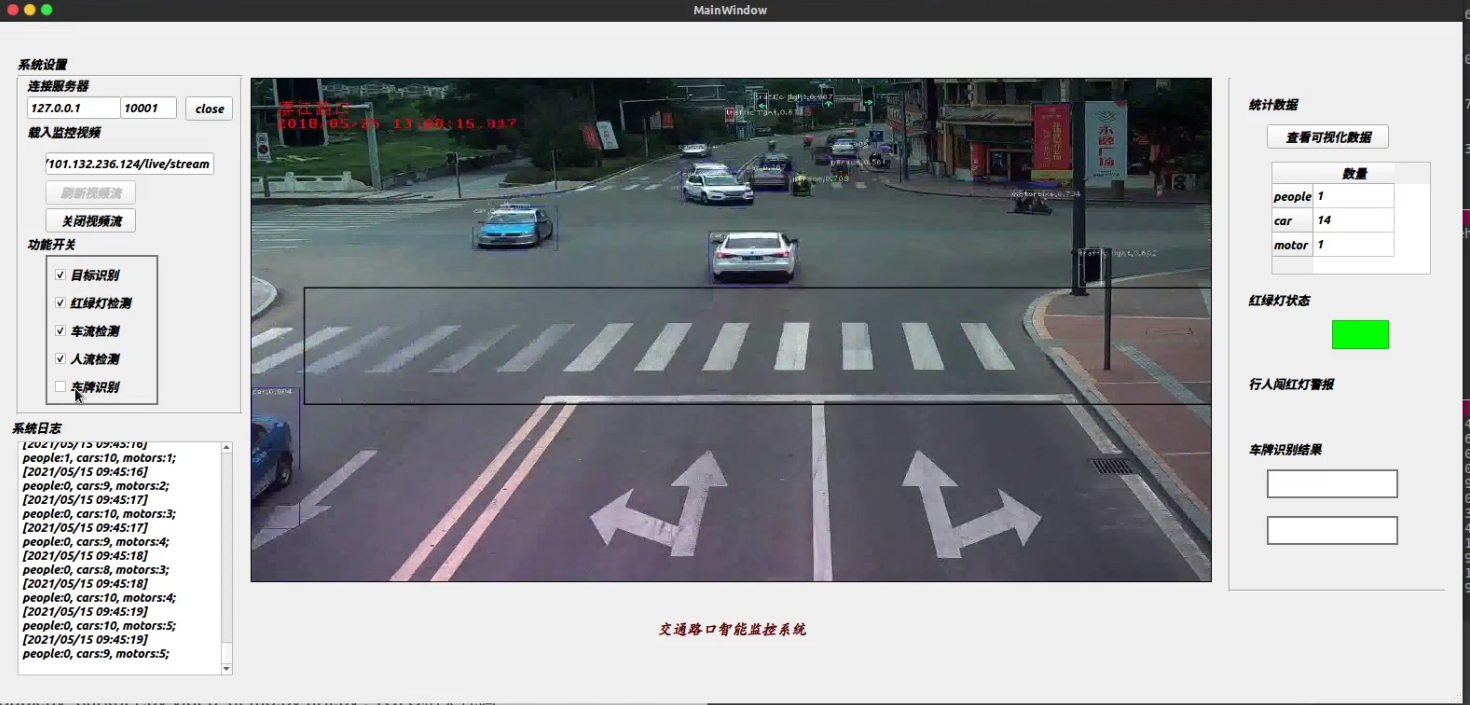
项目背景:智能交通监控系统采用识别技术进行分析,有异常状况发生(比如,当有行人闯红灯时、路口车辆和行人流量过大,导致堵塞交通时)就会自动通知交通管理人员.
基于以上背景,我简要介绍一下本项目的设计架构.
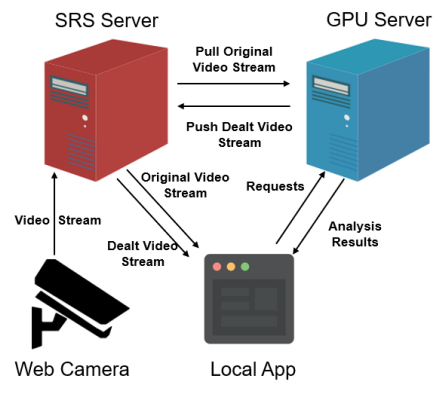
项目主要由三个模块组成,分别是:SRS流媒体服务器,云端GPU服务器,本地客户端.
首先,网络摄像机将交通路口的监控视频实时上传到SRS流媒体服务器。
然后,当SRS流媒体服务器有视频流输入时,云端GPU服务器拉取原始视频流,然后通过YOLO等目标检测算法对视频进行分析和处理,然后将处理后的视频推流到SRS服务器。
对于本地客户端,一方面可以直接从流媒体服务器拉流,查看远端网络摄像机的实时监控画面。另一方面,本地客户端也可以选择和远端的服务器通过进行通信(基于选择器 I/O复用库,支持并发连接),获取服务器对监控视频的分析结果,比如路口的车流量、人流量等。同时,当选择与GPU服务器连接时,本地客户端也将更换流地址,拉取处理后的视频流.Socketrtmp
这里没有采用将分析结果发送到客户端,然后在客户端对目标进行标注的原因主要是考虑到分析结果和视频流刷新的同步问题。直接把处理后的视频推流是一个简单粗暴但行之有效的方法。
注意: 我的测试环境: ubuntu16.04STL + Python3.5
cd Intelligent-Traffic-Based-On-CVpython3 -m venv .source bin/activatepip install -r requirements.txt注意:如果遇到某个包不能下载,可以先搜索该库对应版本的whl文件,下载到本地,然后安装whl.
scripts_2 : python脚本
# -*- coding:utf-8 -*-# ffmpeg -re -stream_loop -1 -i traffic.flv -c copy -f flv rtmp://101.132.236.124/live/livestream# rtmp://101.132.236.124/live/streamimport selectorsimport socketimport pickleimport jsonimport sys import threadingimport multiprocessingimport subprocess as spimport timeimport torchfrom video_demo import target_detect, target_detect_2, traffic_light_detect, classNum_detectfrom darknet import Darknetfrom plateRecognition import recognize_plate, drawRectBoxfrom detect import detect_car_colorimport cv2class ServerAchieve: def __init__(self): self.mysel = selectors.DefaultSelector() self.keep_running = True self.result_queue = multiprocessing.Queue(maxsize=10) self.server_tcp_thread = threading.Thread(target=self.connectClient, daemon=True) self.server_tcp_thread.start() self.cap = cv2.VideoCapture("rtmp://101.132.236.124/live/livestream") print("cap init is completed") # self.recognize_thread = threading.Thread(target=self.tt1, daemon=True) # self.recognize_thread.start() # multiprocessing.set_start_method(method='spawn') # init # 视频读取多进程队列 self.video_queue = multiprocessing.Queue(maxsize=10) #self.function_queue = multiprocessing.Queue(maxsize=2) self.deal_data_queue = multiprocessing.Queue(maxsize=10) video_process = [multiprocessing.Process(target=self.readVideo), multiprocessing.Process(target=self.dealVideo,), multiprocessing.Process(target=self.dealData,)] #multiprocessing.Process(target=self.plateDeal)] for process in video_process: process.daemon = True process.start() for process in video_process: process.join() def plateDeal(self): while True: # print("plate_recognize\n") frame = self.video_queue.get() # 车牌识别 # data_dict['plate_info_list'] = recognize_plate(data_dict['frame']) r_p = recognize_plate(frame) if (len(r_p)): print("have plate") print(r_p[0]) def readVideo(self): while True: while(self.cap.isOpened()): if True:#self.function_queue.get()['target_detect_is_open']: ret, frame = self.cap.read() if not ret: print("Opening camera is failed") break self.video_queue.put(frame) if self.video_queue.qsize() > 4: self.video_queue.get() else: # 让另一个进程读取图片 time.sleep(0.01) def dealData(self): # 闯红灯行人数, # 红绿灯 # 行人数 车辆数 摩托数 # result_dict = { 'pedestrians_num':'', 'traffic_light_color':'', 'people_num':0, 'cars_num':0, 'motors_num':0, 'plate_info_list':[], 'data_h':True} i = 0 while True: data_dict = self.deal_data_queue.get() # print("get deal data") traffic_light_color = traffic_light_detect(data_dict['output'], data_dict['frame']) result_dict['plate_info_list'] = data_dict['plate_info_list'] # result_dict['plate_info_list'] = recognize_plate(data_dict['frame']) people_num, cars_num, motors_num = classNum_detect(data_dict['output']) result_dict['pedestrians_num'] = data_dict['pedestrians_num'] result_dict['traffic_light_color'] = traffic_light_color result_dict['people_num'] = people_num result_dict['cars_num'] = cars_num result_dict['motors_num'] = motors_num self.result_queue.put(result_dict) if self.result_queue.qsize() > 3: self.result_queue.get() else: time.sleep(0.01) pass def dealVideo(self): # 只有客户端选择check box时,才可以进行推流.(在进入这个函数之前) rtmpUrl = "rtmp://101.132.236.124/live/stream" # Get video information fps = int(self.cap.get(cv2.CAP_PROP_FPS)) width = int(self.cap.get(cv2.CAP_PROP_FRAME_WIDTH)) height = int(self.cap.get(cv2.CAP_PROP_FRAME_HEIGHT)) # ffmpeg command command = ['ffmpeg', '-y', '-f', 'rawvideo', '-vcodec','rawvideo', '-pix_fmt', 'bgr24', '-r', '7', '-s', "{ }x{ }".format(width, height),# '-r', str(fps), '-i', '-', '-pix_fmt', 'yuv420p', '-f', 'flv', rtmpUrl] print("deal Video process!") # 管道配置 p = sp.Popen(command, stdin=sp.PIPE) # while not self.function_queue.get()['target_detect_is_open']: # time.sleep(1) # 加载模型 CUDA = torch.cuda.is_available() print("Loading network.....") model = Darknet("../yolov3/cfg/yolov3.cfg") #self.model = Darknet("../yolov3/cfg/yolov2-tiny.cfg") model.load_weights("../yolov3/weights/yolov3.weights") #self.model.load_weights("../yolov3/weights/yolov2-tiny.weights") print("Network successfully loaded") model.net_info["height"] = 416 inp_dim = int(model.net_info["height"]) assert inp_dim % 32 == 0 assert inp_dim > 32 if CUDA: model.cuda() # 将模型迁移到GPU model.eval() data_dict = { 'frame':None, 'output':None, 'pedestrians_num':None, 'plate_info_list':[]} i = 0 while True: frame = self.video_queue.get() data_dict['frame'] = frame.copy() data_dict['plate_info_list'] = [] # 车牌识别 # if(i == 30): # # data_dict['plate_info_list'] = recognize_plate(data_dict['frame']) # if (len(recognize_plate(data_dict['frame']))): # print("have plate") # print(recognize_plate[0]) # i = 0 # i += 1 output, orign_img, frame, pedestrians_num = target_detect(model, frame) data_dict['output'] = output data_dict['pedestrians_num'] = pedestrians_num self.deal_data_queue.put(data_dict) p.stdin.write(frame.tostring()) # traffic_light_color = traffic_light_detect(output, orign_img) # people_num, cars_num, motors_num = classNum_detect(output) # plate_info_list = recognize_plate(orign_img) # result_dict['pedestrians_num'] = pedestrians_num # result_dict['traffic_light_color'] = traffic_light_color # result_dict['people_num'] = people_num # result_dict['cars_num'] = cars_num # result_dict['motors_num'] = motors_num # # result_dict['plate_info_list'] = plate_info_list #self.result_queue.put(result_dict, block=False) #self.result_queue.get() def socketRead(self, connection, mask): empty_dict = { 'empty':'empty'} result_dict = { 'pedestrians_num':'', 'traffic_light_color':'', 'people_num':0, 'cars_num':0, 'motors_num':0, 'plate_info_list':'', 'data_h':False} client_address = connection.getpeername() client_data = connection.recv(1024) if client_data: # 可读的客户端 socket 有数据 if client_data.decode() != "exit": if self.result_queue.empty(): # print("waiting send...111") result_json = json.dumps(result_dict) connection.sendall(result_json.encode()) # 回馈信息给客户端 else: # print("waiting send...222") callback_json = json.dumps(self.result_queue.get()) connection.sendall(callback_json.encode()) # 回馈信息给客户端 print("read ......") else: print('closing.....') self.mysel.unregister(connection) connection.close() # print('read({ })'.format(client_address)) else: # 如果没有数据,释放连接 print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') print('closing.....') self.mysel.unregister(connection) connection.close() # 告诉主进程停止 # self.keep_running = False def socketAccept(self, sock, mask): # "有新连接的回调" new_connection, addr = sock.accept() print('accept({ })'.format(addr)) new_connection.setblocking(False) self.mysel.register(new_connection, selectors.EVENT_READ, self.socketRead) def connectClient(self): server_address = ('127.0.0.1', 10001) print('starting up on { } port { }'.format(*server_address)) server = socket.socket(socket.AF_INET, socket.SOCK_STREAM) server.setsockopt(socket.SOL_SOCKET,socket.SO_REUSEADDR,1) server.setblocking(False) server.bind(server_address) server.listen(5) self.mysel.register(server, selectors.EVENT_READ, self.socketAccept) while True: print('waiting for I/O') for key, mask in self.mysel.select(timeout=1): callback = key.data callback(key.fileobj, mask) def show_frame(self): pass # cv2.imshow('frame', self.frame) # cv2.waitKey(self.FPS_MS)if __name__ == '__main__': sa = ServerAchieve() while True: try: # sa.show_frame() pass except AttributeError: passfrom __future__ import divisionimport torch import randomimport numpy as np#import cv2def confidence_filter(result, confidence): conf_mask = (result[:,:,4] > confidence).float().unsqueeze(2) result = result*conf_mask return resultdef confidence_filter_cls(result, confidence): max_scores = torch.max(result[:,:,5:25], 2)[0] res = torch.cat((result, max_scores),2) print(res.shape) cond_1 = (res[:,:,4] > confidence).float() cond_2 = (res[:,:,25] > 0.995).float() conf = cond_1 + cond_2 conf = torch.clamp(conf, 0.0, 1.0) conf = conf.unsqueeze(2) result = result*conf return resultdef get_abs_coord(box): box[2], box[3] = abs(box[2]), abs(box[3]) x1 = (box[0] - box[2]/2) - 1 y1 = (box[1] - box[3]/2) - 1 x2 = (box[0] + box[2]/2) - 1 y2 = (box[1] + box[3]/2) - 1 return x1, y1, x2, y2 def sanity_fix(box): if (box[0] > box[2]): box[0], box[2] = box[2], box[0] if (box[1] > box[3]): box[1], box[3] = box[3], box[1] return boxdef bbox_iou(box1, box2): """ Returns the IoU of two bounding boxes """ #Get the coordinates of bounding boxes b1_x1, b1_y1, b1_x2, b1_y2 = box1[:,0], box1[:,1], box1[:,2], box1[:,3] b2_x1, b2_y1, b2_x2, b2_y2 = box2[:,0], box2[:,1], box2[:,2], box2[:,3] #get the corrdinates of the intersection rectangle inter_rect_x1 = torch.max(b1_x1, b2_x1) inter_rect_y1 = torch.max(b1_y1, b2_y1) inter_rect_x2 = torch.min(b1_x2, b2_x2) inter_rect_y2 = torch.min(b1_y2, b2_y2) #Intersection area if torch.cuda.is_available(): inter_area = torch.max(inter_rect_x2 - inter_rect_x1 + 1,torch.zeros(inter_rect_x2.shape).cuda())*torch.max(inter_rect_y2 - inter_rect_y1 + 1, torch.zeros(inter_rect_x2.shape).cuda()) else: inter_area = torch.max(inter_rect_x2 - inter_rect_x1 + 1,torch.zeros(inter_rect_x2.shape))*torch.max(inter_rect_y2 - inter_rect_y1 + 1, torch.zeros(inter_rect_x2.shape)) #Union Area b1_area = (b1_x2 - b1_x1 + 1)*(b1_y2 - b1_y1 + 1) b2_area = (b2_x2 - b2_x1 + 1)*(b2_y2 - b2_y1 + 1) iou = inter_area / (b1_area + b2_area - inter_area) return ioudef pred_corner_coord(prediction): #Get indices of non-zero confidence bboxes ind_nz = torch.nonzero(prediction[:,:,4]).transpose(0,1).contiguous() box = prediction[ind_nz[0], ind_nz[1]] box_a = box.new(box.shape) box_a[:,0] = (box[:,0] - box[:,2]/2) box_a[:,1] = (box[:,1] - box[:,3]/2) box_a[:,2] = (box[:,0] + box[:,2]/2) box_a[:,3] = (box[:,1] + box[:,3]/2) box[:,:4] = box_a[:,:4] prediction[ind_nz[0], ind_nz[1]] = box return predictiondef write(x, batches, results, colors, classes): c1 = tuple(x[1:3].int()) c2 = tuple(x[3:5].int()) img = results[int(x[0])] cls = int(x[-1]) label = "{ 0}".format(classes[cls]) color = random.choice(colors) cv2.rectangle(img, c1, c2,color, 1) t_size = cv2.getTextSize(label, cv2.FONT_HERSHEY_PLAIN, 1 , 1)[0] c2 = c1[0] + t_size[0] + 3, c1[1] + t_size[1] + 4 cv2.rectangle(img, c1, c2,color, -1) cv2.putText(img, label, (c1[0], c1[1] + t_size[1] + 4), cv2.FONT_HERSHEY_PLAIN, 1, [225,255,255], 1); return img#coding=utf-8import cv2import numpy as npfrom keras import backend as Kfrom keras.models import *from keras.layers import *import tensorflow as tfchars = [u"京", u"沪", u"津", u"渝", u"冀", u"晋", u"蒙", u"辽", u"吉", u"黑", u"苏", u"浙", u"皖", u"闽", u"赣", u"鲁", u"豫", u"鄂", u"湘", u"粤", u"桂", u"琼", u"川", u"贵", u"云", u"藏", u"陕", u"甘", u"青", u"宁", u"新", u"0", u"1", u"2", u"3", u"4", u"5", u"6", u"7", u"8", u"9", u"A", u"B", u"C", u"D", u"E", u"F", u"G", u"H", u"J", u"K", u"L", u"M", u"N", u"P", u"Q", u"R", u"S", u"T", u"U", u"V", u"W", u"X", u"Y", u"Z",u"港",u"学",u"使",u"警",u"澳",u"挂",u"军",u"北",u"南",u"广",u"沈",u"兰",u"成",u"济",u"海",u"民",u"航",u"空" ]class LPR(): def __init__(self,model_detection,model_finemapping,model_seq_rec): self.watch_cascade = cv2.CascadeClassifier(model_detection) self.modelFineMapping = self.model_finemapping() self.modelFineMapping.load_weights(model_finemapping) self.modelSeqRec = self.model_seq_rec(model_seq_rec) self.graph = tf.get_default_graph() def computeSafeRegion(self,shape,bounding_rect): top = bounding_rect[1] # y bottom = bounding_rect[1] + bounding_rect[3] # y + h left = bounding_rect[0] # x right = bounding_rect[0] + bounding_rect[2] # x + w min_top = 0 max_bottom = shape[0] min_left = 0 max_right = shape[1] if top < min_top: top = min_top if left < min_left: left = min_left if bottom > max_bottom: bottom = max_bottom if right > max_right: right = max_right return [left,top,right-left,bottom-top] def cropImage(self,image,rect): x, y, w, h = self.computeSafeRegion(image.shape,rect) return image[y:y+h,x:x+w] def detectPlateRough(self,image_gray,resize_h = 720,en_scale =1.08 ,top_bottom_padding_rate = 0.05): if top_bottom_padding_rate>0.2: print ("error:top_bottom_padding_rate > 0.2:",top_bottom_padding_rate) exit(1) height = image_gray.shape[0] padding = int(height*top_bottom_padding_rate) scale = image_gray.shape[1]/float(image_gray.shape[0]) image = cv2.resize(image_gray, (int(scale*resize_h), resize_h)) image_color_cropped = image[padding:resize_h-padding,0:image_gray.shape[1]] image_gray = cv2.cvtColor(image_color_cropped,cv2.COLOR_RGB2GRAY) watches = self.watch_cascade.detectMultiScale(image_gray, en_scale, 2, minSize=(36, 9),maxSize=(36*40, 9*40)) cropped_images = [] for (x, y, w, h) in watches: x -= w * 0.14 w += w * 0.28 y -= h * 0.15 h += h * 0.3 cropped = self.cropImage(image_color_cropped, (int(x), int(y), int(w), int(h))) cropped_images.append([cropped,[x, y+padding, w, h]]) return cropped_images def fastdecode(self,y_pred): results = "" confidence = 0.0 table_pred = y_pred.reshape(-1, len(chars)+1) res = table_pred.argmax(axis=1) for i,one in enumerate(res): if one= image.shape[1]-1: T= image.shape[1]-1 rect[2] -= rect[2]*(1-res_raw[1] + res_raw[0]) rect[0]+=res[0] image = image[:,H:T+2] image = cv2.resize(image, (int(136), int(36))) return image,rect def recognizeOne(self,src): x_tempx = src x_temp = cv2.resize(x_tempx,( 164,48)) x_temp = x_temp.transpose(1, 0, 2) y_pred = self.modelSeqRec.predict(np.array([x_temp])) y_pred = y_pred[:,2:,:] return self.fastdecode(y_pred) def SimpleRecognizePlateByE2E(self,image): images = self.detectPlateRough(image,image.shape[0],top_bottom_padding_rate=0.1) res_set = [] for j,plate in enumerate(images): plate, rect =plate image_rgb,rect_refine = self.finemappingVertical(plate,rect) res,confidence = self.recognizeOne(image_rgb) res_set.append([res,confidence,rect_refine]) K.clear_session() return res_set













